
Станционный осмотритель: новый российский робот отремонтирует МКС
Для работ в открытом космосе создан автономный мобильный робот. Предполагается, что он будет передвигаться по поверхности МКС с помощью двух манипуляторов с магнитными захватами. Набор сменного инструмента позволит устройству, сделанному в России, перемещать грузы, выполнять монтаж оборудования, а также участвовать в научных экспериментах. Отправить косморобота на станцию планируется в 2022 году.
Специалист на все руки
Среди задач устройства — размещение на поверхности МКС полезной нагрузки, проведение инспекций внешней поверхности и поддержка космонавтов при работе вне станции. Многофункциональность двух его манипуляторов обеспечивается специальным отсеком со сменным инструментом (кроме того в разработке реализованы опорный и обзорный манипуляторы).

Оперативно меняя насадки на манипуляторах, косморобот может перемещать предметы (их максимальная масса составляет 200 кг), а также подключать и демонтировать разнообразное оборудование, работая с резьбовыми соединениями, электрическими разъемами и изоляцией. Несмотря на то что «стационарного» веса в невесомости нет, это не отменяет силу инерции, которая вынуждает космонавтов прикладывать достаточно большие усилия для того, чтобы сдвинуть с места тяжелый предмет, а потом остановить его в нужной точке. Поэтому робот оснащается мощными манипуляторами, приводы которых имеют большой крутящий момент.
— На поверхности станции устройство может обеспечить поддержку космонавтов — например, заранее подготовить рабочее место, а после выхода людей в открытый космос выполнить часть технологических операций — подсветить нужную зону или подать необходимые инструменты, — рассказал «Известиям» заместитель главного конструктора ЦНИИ Робототехники и технической кибернетики (РТК) Игорь Даляев.
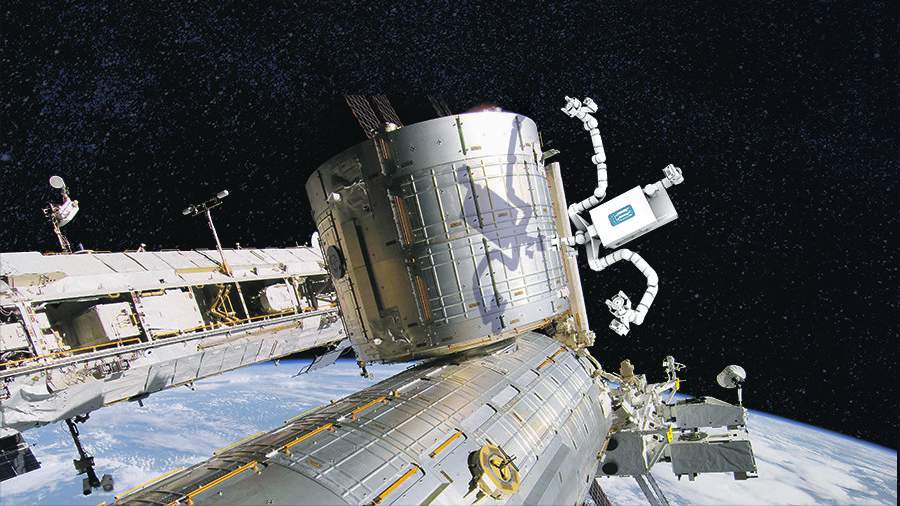
Одним из главных преимуществ устройства разработчики называют его мобильность — механический помощник сможет активно перемещаться по станции с помощью такелажных элементов и специальных поручней, которые устанавливаются на ее внешней поверхности.
— Сами эти элементы представляют собой стыковочные узлы, к которым робот может присоединиться, используя магнитные захваты, установленные на его манипуляторах, — рассказал научный руководитель — генеральный конструктор ЦНИИ робототехники и технической кибернетики Виталий Лопота. — Также в рамках проекта на корпусе МКС размещаются две базовые точки — на них устройство может подзаряжать аккумуляторную батарею, емкости которой достаточно для более чем восьмичасовой автономной работы (именно столько составляет средняя продолжительность выхода космонавта в открытый космос. — «Известия»).
Выбранный способ перемещения робота позволяет внедрить его на МКС с наименьшими изменениями станционной инфраструктуры, за построение которой отвечают специалисты РКК «Энергия». При этом главным сегментом станции, необходимым для начала работы устройства, послужит Научно-энергетический модуль (НЭМ), который будет запущен и пристыкован к станции в 2022 году.
Сила под контролем
Для ориентации в пространстве робот использует комплекс из нескольких телекамер с объективами разной фокусировки, которые обеспечивают обзор предметов, находящихся на различном удалении. По словам разработчиков, камеры подключены к адаптивной системе управления, которая может распознавать различные объекты и принимать решения о дальнейшем движении робота на основе заложенных в нее алгоритмов — благодаря этому устройство способно перемещаться и выполнять все операции в автоматическом режиме.

Также ученые предусмотрели и вариант ручного управления — оно будет осуществляться со специальных пультов, размещенных как на самой станции, так и в наземном центре управления полетами.
Для лучшего контроля движения устройства на его манипуляторах установлены датчики, позволяющие отследить их положение, а также силу, с которой они воздействуют на окружающие предметы. Именно эта возможность позволяет роботу контролировать свои движения таким образом, чтобы выполнить техническую задачу, не причинив ущерба космонавтам и станции.
— У робота есть три режима управления: автоматический, когда он выполняет заранее заданную программу, супервизорный — в этом случае человек выбирает его дальнейшие действия после завершения каждого из этапов работы, и ручной, при котором оператор непосредственно контролирует движения устройства с помощью задающей рукоятки, имеющей семь степеней подвижности, — пояснил начальник отдела проектирования робототехнических систем ЦНИИ РТК Александр Трутс. — Особенно важно, что при последнем варианте космонавт будет чувствовать интенсивность усилий, с которым работают манипуляторы, через обратную связь — при увеличении прилагаемой силы рукоятка будет больше сопротивляться управляющему воздействию и наоборот.
Впрочем, даже при ручном режиме управления автоматика не позволит оператору выйти за пределы тех параметров воздействия, которые разработчики считают безопасными.
Модульный принцип
Косморобот спроектирован по модульному принципу. С одной стороны, это позволит в кратчайшие сроки собрать его на борту МКС, а с другой — даст возможность легкой замены отслуживших свой срок элементов на запасные, в том числе — в открытом космосе. В конструкции устройства его создатели применяли исключительно отечественные комплектующие.

Кроме того, модульный принцип построения дает роботу большой потенциал для дальнейшей модернизации, благодаря чему сфера его применения, скорее всего, не ограничится МКС. В частности, после небольшой доработки устройство можно будет использовать для обслуживания космических станций, которые планируется запустить на орбиты Луны и Марса. По словам конструкторов, это позволит повысить автономность станций, а в перспективе может привести к полной автоматизации таких объектов, если появится необходимость.
— Возможен и вариант, при котором элементы нашего устройства станут применяться на поверхности планет и спутников, — отметил Игорь Даляев. — Например, систему управления роботом можно использовать на луноходах, а его манипуляторы задействовать при строительстве базы на Марсе. Также для перспективной техники могут понадобиться созданные нами интерфейсы для стыковки модулей друг с другом и некоторые другие технологические решения, актуальные для робототехники, которая будет создавать и обслуживать космическую инфраструктуру.
О целесообразности внедрения разработки «Известиям» также рассказали в НПО «Андроидная техника» (компания — разработчик робота «Федор». — «Известия»).
— Согласно результатам исследований, современные роботы могут выполнять порядка 90% всех операций, проводимых на внешней поверхности МКС, — отметил исполнительный директор компании Евгений Дудоров. — Таким образом, при реализации подобного проекта мы получим эффективное решение, которое позволит заметно сократить длительность выходов космонавтов в открытый космос, добавит им лишнюю пару «рук», а также освободит от проведения части научных экспериментов.
При этом эксперт затруднился назвать недостатки в конструкции устройства.
— Какие-либо проблемные моменты могут быть выявлены только на стадии испытаний робота. Но даже при возникновении трудностей эта разработка будет стоить потраченных усилий, поскольку является настоящим прорывом в области космической робототехники и не имеет прямых аналогов, — подчеркнул Евгений Дудоров.
В настоящее время на действующем образце-демонстраторе уже были отработаны технологии, необходимые для создания и последующего развития косморобота. А построение его опытного образца ученые планируют завершить в конце нынешнего года. Ожидается, что на МКС устройство доставят в 2022 году.


