
Робот Федор полетит на орбиту
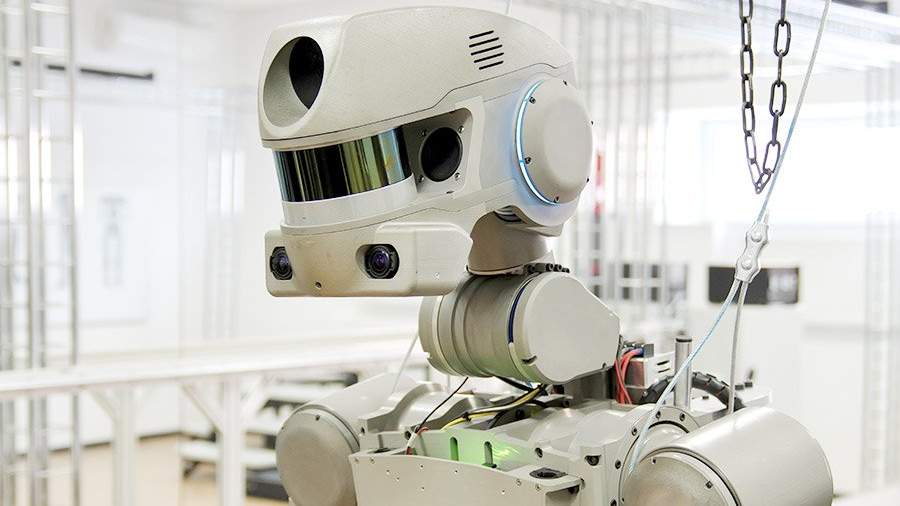
Российский человекоподобный робот Федор станет первым испытателем нового российского космического корабля «Федерация». Такое решение принято координационным научно-техническим советом по проведению экспериментов на пилотируемых комплексах. На борту робот будет имитировать функции пилота, хотя по-настоящему управлять кораблем будут с Земли.
Головной научный институт ракетно-космической отрасли ЦНИИмаш утвердил программу космического эксперимента «Исследование возможностей использования дистанционно-управляемого антропоморфного робота в перспективных пилотируемых транспортных кораблях нового поколения». Суть его заключается в испытаниях в условиях невесомости космической версии робота Федора, созданного Фондом перспективных исследований (ФПИ) по заказу МЧС в рамках проекта «Спасатель».
— При создании Федора мы руководствовались необходимостью заменить людей на дистанционно управляемых и автономных антропоморфных роботов при работе в космосе, морских глубинах и в других условиях с опасными для жизни и здоровья факторами, — рассказал «Известиям» руководитель проекта в ФПИ Сергей Хурс.
Техническое задание на эксперимент согласовано и сейчас ведется разработка техзадания на научную аппаратуру, а во II квартале 2020 года летный образец космической версии Федора должен быть готов к полету.
Проведение самого эксперимента планируется в III квартале 2021 года во время испытательного полета корабля «Федерация» в беспилотном режиме. Предполагается, на орбиту корабль выведет новая российская ракета «Союз-5», проектирование которой уже началось.
В автономном полете корабль с роботом проведет одни сутки, во время которых пройдет три 30–45-минутных эксперимента по дистанционному управлению роботом с Земли. На оператора будет надет специальный костюм, с помощью которого можно будет управлять движением головы и рук Федора. Он будет работать с пультом космического корабля, но без выдачи реальных команд, озвучивать все свои действия и показывать ситуацию внутри корабля через камеры в «глазах». В остальное время Федор будет автономно выполнять заранее заложенные в него программы.
В космос робот полетит в новом амортизационном кресле «Чегет», испытав с помощью сенсоров его эргономику. Сенсоры также дадут ученым данные по нагрузкам во время этапа выведения на орбиту и приземления.
На случай непредвиденной ситуации разработчики эксперимента предусмотрели установку внутри Федора резервного блока управления, который выключит «испытателя» при недопустимых самостоятельных действиях и при возникновении любых нештатных ситуаций в корабле.
Организаторы эксперимента рассчитывают, что его проведение позволит продемонстрировать высокий уровень российской робототехники и внести вклад в популяризацию космонавтики среди молодежи.
В будущем робота ждут более серьезные испытания. По мнению разработчиков эксперимента, антропоморфные роботы могут быть применены на космических станциях, на планетных базах и в межпланетных комплексах. На орбитальных станциях они смогут выполнять инспекцию, установку и обслуживание оборудования, оказывать помощь космонавтам во время выходов в открытый космос.
— Внутрикорабельная деятельность космонавтов пока самодостаточна, а вот выход человека в открытый космос сопряжен со значительным риском, физическими и физиологическими ограничениями, которые легко преодолевает антропоморфный робот, — рассказал Сергей Хурс. — Поэтому антропоморфный робот для внекорабельной деятельности с сочетанием высокой автономности и возможностью копирующего управления позволит проводить технически сложные и длительные работы вне корабля без повышенного риска для космонавтов. В качестве следующей цели можно рассматривать напланетную деятельность, где людям потребуются помощники, с которыми можно работать в составе группы, а некоторые задачи можно будет решать в автономном режиме под наблюдением или с последующим отчетом о выполненной миссии.
Уже сегодня робототехнические системы активно используются на американском сегменте МКС для выполнения операций стыковок, обслуживания астронавтов при внекорабельной деятельности.
На американском сегменте станции используются такие робототехнические системы, как рука-манипулятор Canadarm2 и Dextre, дистанционный манипулятор (JEMRMS), персональный помощник астронавта PSA, в сентябре 2010 года на американский сегмент МКС был доставлен антропоморфный робот Robonaut -2.
Читайте про отправку космонавтов на орбиту в нашем спецпроекте «Таких берут в космонавты»
