
- Статьи
- Наука и техника
- Пристанционный смотритель: умный робот определит неисправности на энергообъектах
Пристанционный смотритель: умный робот определит неисправности на энергообъектах

Российские ученые сконструировали робота, предназначенного для обслуживания электроподстанций. Устройство представляет собой платформу на гусеничном шасси, оснащенную приборами, которые позволяют разносторонне исследовать объекты инфраструктуры. В частности, аппаратный комплекс дает возможность дистанционно выявлять скрытые дефекты силового оборудования, изоляторов и токопроводящих элементов конструкций. Эксперты отметили, что энергообъекты относятся к категории повышенной опасности, поэтому такие манипуляции будут полезными.
Как роботы находят дефекты
Ученые-инженеры в Казанском государственном энергетическом университете создали робота, который самостоятельно определяет неисправности на электроподстанциях. Кроме того, он может взять на себя обязанности по обходу объектов и сбору показаний счетчиков и приборов.
Устройство представляет собой платформу на гусеничном шасси, на которой установлено различное исследовательское оборудование. Аппарат самостоятельно перемещается по заданным ориентирам, объезжает и преодолевает препятствия. Причем все манипуляции он производит при помощи программного обеспечения российского производства. Разработчики считают, что такие машины будут способствовать повышению надежности и безопасности энергосистем.
— При конструировании комплекса мы исходили из того, что высоковольтная энергетика — это в первую очередь силовое оборудование и изоляция. Об их исправности можно судить, в частности, по уровню разрядной активности. Поэтому задача разработчиков заключалась в том, чтобы оснастить машину приборами для точного распознавания этих явлений, — рассказал «Известиям» руководитель проекта, заведующий кафедры «Промышленная электроника» КГЭУ Дмитрий Иванов.

По его словам, уникальность конструкции состоит в том, что на ней установлены системы, которые дают возможность изучать объекты энергетики разносторонне и комплексно. Например, бортовая ультрафиолетовая камера используется для визуализации коронных и дуговых электрических разрядов, а акустический датчик помогает распознать эти явления по характерному потрескиванию.

Вместе с тем тепловизор регистрирует перегретые участки, которые возникают в результате механического износа токоведущих элементов или загрязнения и изоляторов. Лидар, в свою очередь, сканирует окружающее пространство и регистрирует изменение геометрии. Это происходит, например, если накренилась опора линии электропередачи. Кроме того, на роботе есть обычная оптическая камера, с помощью которой фиксируются данные индикаторных приборов, установленных на силовом оборудовании.
— Следующая задача машины — это перевод полученных данных в «цифру» и на удаленный сервер, где информация будет обработана. В случае обнаружения аномалий на пункт управления поступит сообщение об опасности, — пояснил Дмитрий Иванов.
Когда роботы эффективнее человека
Как сообщил ученый, при разработке проекта учитывалось разнообразие архитектур электроподстанций. Поэтому в программном обеспечении заложена возможность быстрой адаптации аппарата под каждый конкретный объект.
Помимо этого, в зависимости от потребностей варьируется набор бортового оборудования. В частности, при необходимости робот может быть оснащен газоанализаторами, инфракрасными камерами и другими устройствами. Также комплект бортовой техники может быть дополнен теми или иными манипуляторами.

В перспективе, по задумке разработчиков, устройство будет обучаться с помощью алгоритмов искусственного интеллекта, что даст роботу возможность выполнять любые задачи. В настоящий момент аппарат рассчитан на два часа работы. Исходя из этого, проектируется его маршрут, по завершении которого устройство встает на подзарядку до следующего рейса.
— Сетевые компании активно внедряют разработки, связанные с цифровизацией, машинным обучением, робототехникой. Это приносит свои плоды, поскольку, например, роботы выполняют за человека большой объем рутинной работы, что актуально для электроподстанций, удаленных от населенных пунктов. Вместе с тем при осмотре оборудования, благодаря своим тепловизионным или ультразвуковым датчикам, машины могут выявить дефекты, которые не заметны человеческому глазу, — прокомментировал «Известиям» начальник отдела новой техники и технологий АО «Сетевая компания» Марат Хабибуллин.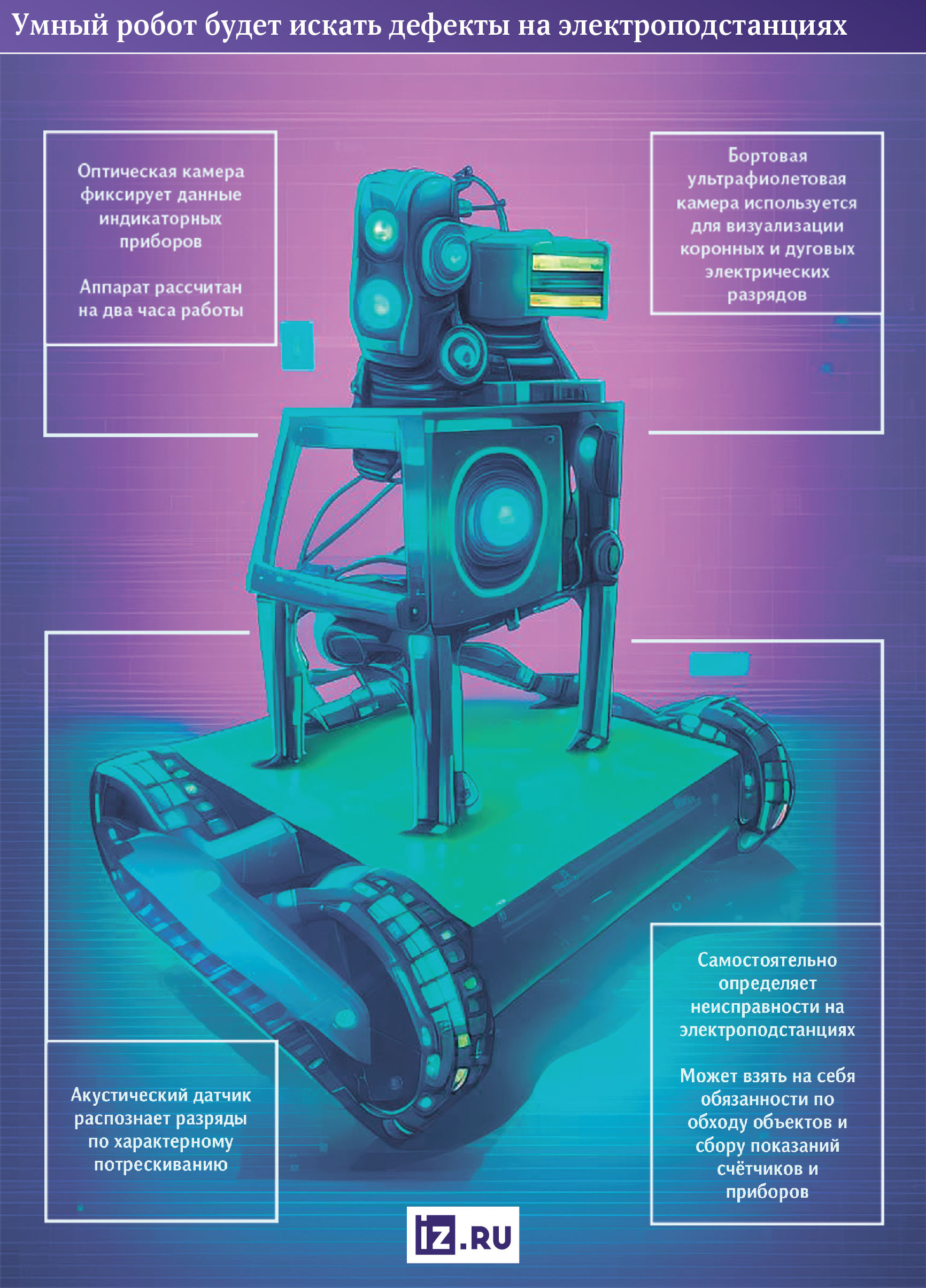
Он пояснил, что, к примеру, если аппарат зафиксировал нагрев трансформатора, это может говорить о каком-то внутреннем повреждении. Либо, если акустическая и УФ-камеры фиксируют искрение в изоляторе, значит, возможен процесс разрушения агрегата.
— Энергетическая инфраструктура — это объекты повышенной опасности, где замена человека на робота — это, в целом, полезное мероприятие. В труднодоступных местах содержание умной машины будет обходиться дешевле, чем специалист, — объяснил заведующий кафедры радиофотоники и микроволновых технологий Казанского национального исследовательского университета им. А.Н. Туполева Артем Кузнецов.

Однако, отметил эксперт, при внедрении роботизированных комплексов на электроподстанциях необходимо будет проектировать систему под каждый конкретный объект, а затем отлаживать процесс, проводить техобслуживание робота, что тоже потребует дополнительных затрат.

Вместе с тем нужно понимать, что робот не сможет заменить человека во всех ситуациях. Особенно, когда требуется нестандартное мышление и оперативное принятие решений. Поэтому полностью исключать инспектирование энергообъектов человеком нежелательно, резюмировал он.
